-
공학설계 | 기계요소(1): 평기어 선정 방법Engineering/Engineering Design 2026. 2. 20. 18:00반응형
1. 평기어

평기어 구동기가 발생시키는 동력을 전달하는 가장 기본적인 기계요소로, 두 개의 평기어가 구동기 축과 평행하게 배치된 상태에서 한 평기어를 회전시키면 톱니가 서로 맞물려 회전하여 동력을 전달한다. 동일한 직경과 잇수를 가진 평기어를 사용한다면 동일한 회전속력과 토크를 전달하지만, 서로 다른 직경과 잇수를 가진 평기어를 조합하면 토크를 낮추는 대신 회전속력을 높이거나, 반대로 회전속력을 낮추는 대신 토크를 높일 수 있다. 이때 상대적으로 큰 기어를 스퍼 기어(spur gear), 작은 기어를 피니언 기어(pinion gear)라고 부른다. 평기어는 아래 링크로 접속하면 본인이 필요한 제원을 고려하여 구매할 수 있다.
MISUMI | 미스미 종합 Web 카탈로그
kr.misumi-ec.com
2. 규격
2.1. 기준원
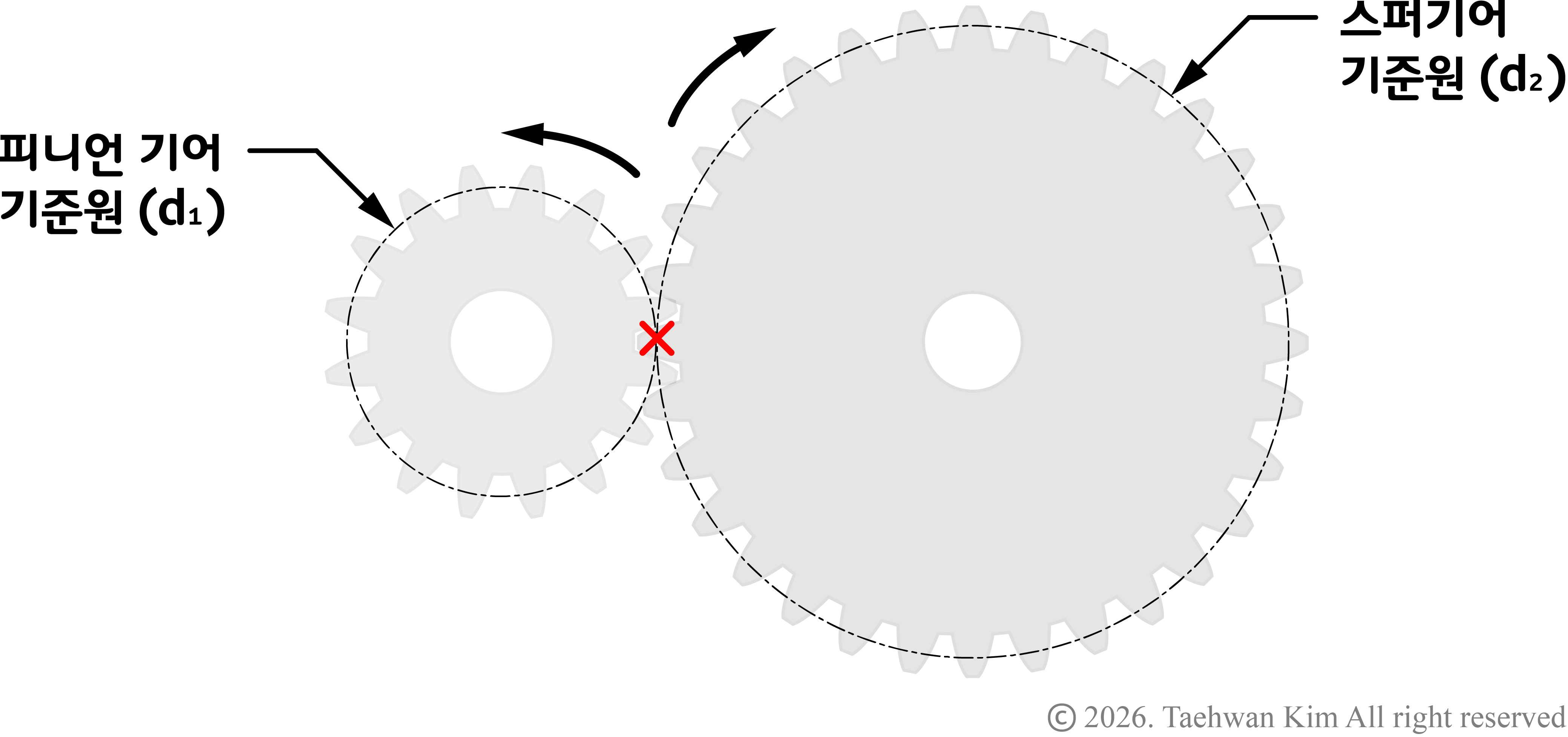
기준원 기준원은 평기어의 원주를 따라 형성된 톱니의 기준이 되는 원이다. 톱니 끝단을 연결한 이끝원보다는 직경이 작고, 톱니 뿌리를 연결한 이뿌리원보다는 직경이 크다. 두 평기어가 맞물려 회전하는 경우 평기어 각각에 대해 기준원을 그리면 두 기준원이 서로 접한 상태를 보인다.
2.2. 모듈
모듈은 평기어의 톱니 크기를 나타내는 규격으로, 기준원 직경 d와 평기어의 이빨 개수 Z로 나누어 아래와 같이 계산할 수 있다. 서로 다른 평기어가 맞물려 회전하기 위해서는 이빨 크기, 즉 모듈이 같아야 한다. 모듈이 다른 평기어끼리는 서로 맞물리지 않으므로 선정 시 주의하자. 일반적으로 부하가 높을수록 큰 모듈의 평기어를 선정한다.
$$ \begin{align} m = \frac{d_1}{Z_1} = \frac{d_2}{Z_2} \end{align}$$3. 선정 방법
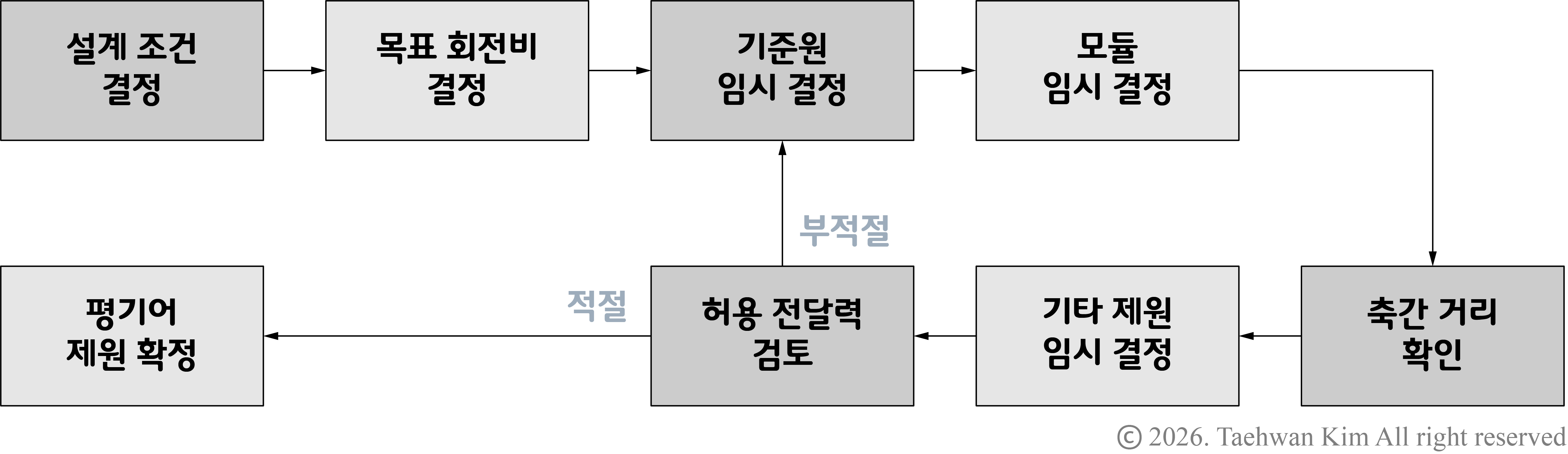
평기어 선정 방법 평기어 선정 시 정해진 순서와 방법이 있는 것은 아니지만 어떤 평기어를 선택할 때 어떤 요소를 고려해야하는지 순서대로 정리하였다. 기본적으로 평기어를 이용해 구현하고자 하는 회전비 혹은 토크비를 먼저 결정하고, 이를 만족할 평기어의 기준원과 모듈을 선택하는 순서로 이루어진다.
3.1. 설계 조건 결정
평기어을 선정하기에 앞서 원동측으로부터 전달된 토크와 회전속도가 종동측에서 어느 정도로 구현되어야 하는지 다음과 같은 설계 조건을 결정한다.
■ 종동측 토크
■ 종동측 회전속도3.2. 목표 회전비 결정

목표 회전비 결정 회전구동기로부터 발생시키고자 하는 목표 토크와 회전속도가 있다면, 평기어 한 쌍을 이용해 회전구동기의 토크를 얼마나 증폭하거나 감쇠시킬지 계산한다. 이를 기반으로 회전구동기에 연결된 원동 평기어와, 이에 맞물려 회전하는 종동 평기어 사이의 속도전달비, 즉 회전비를 결정한다. 이때 맞물리는 한 쌍의 평기어에서 종동 평기어의 이빨 개수가 원동 평기어보다 두 배 많다면 토크는 두 배로 증폭되고, 회전속도는 절반으로 감쇠된다. 반대로 원동 평기어보다 두 배 적다면 회전속도는 두 배 증폭되고, 토크는 절반으로 감쇠된다. 원동 평기어 대비 종동 평기어의 톱니 개수로 정의되는 회전비는 평기어의 톱니 개수 Z, 기준원 직경 d, 회전수 n으로 나타내면 다음과 같다.
$$ \begin{align} i = \frac{Z_2}{Z_1} = \frac{d_2}{d_1} = \frac{n_1}{n_2} \end{align}$$3.3. 기준원 및 모듈 임시 결정
앞서 결정한 회전비를 유지한 채로 원동 기어와 종동 기어의 기준원과 모듈을 임시로 결정한다. 현재 설계에서 기어박스에 허용된 공간을 고려하여 스퍼 기어의 기준원 직경을 먼저 결정하고, 회전비를 고려하여 피니언 기어의 회전비를 임시로 결정한다. 기어박스에 가해질 부하를 고려하여 모듈 또한 임시로 결정한다.
3.4. 축간 거리 확인
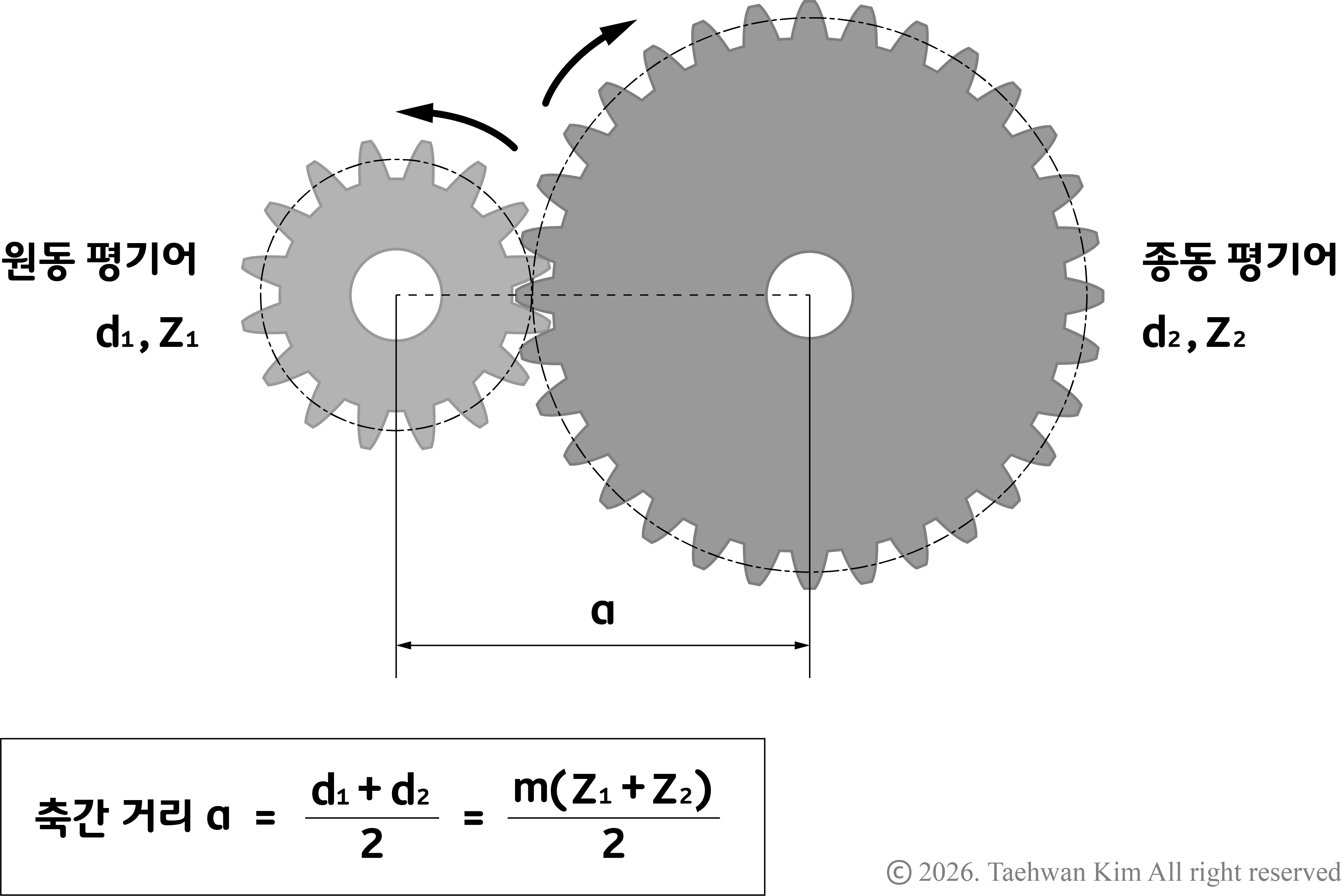
축간 거리 확인 두 평기어의 축간 거리를 확인하여 상대적 위치를 결정한다. 이때 축간 거리는 아래와 같이 기준원의 반지름을 더한 값에 해당한다. 축간 거리를 고려했을 때 두 평기어가 기어박스에 허용된 공간 내에 배치될 수 있을지 가늠한다.
$$ \begin{align} a = \frac{d_1+d_2}{2} = \frac{m\left(Z_1+Z_2\right)}{2} \end{align}$$3.5. 기타 제원 임시 결정 및 허용 전달력 검토
평기어의 두께, 재질, 구멍 직경, 구동축과의 체결 방법 등의 기타 제원을 제조사 혹은 발주처의 카탈로그를 기반으로 결정하여 모델을 임시로 확정한다. 마지막으로 해당 평기어가 현재 설계에서 파손없이 구동할 수 있을지 카탈로그에 제시된 허용 전달력을 기반으로 검토한다. 검증 과정에서 설계 결함을 발견했다면 기준원 임시 결정 단계로 돌아가 선정 과정을 반복한다. 임시 결정한 평기어의 제원이 공학적으로 안전하다고 판단했다면 평기어의 제원을 확정한다.
[함께 읽으면 좋은 페이지]
공학설계 | 기본설계(1): 시제품 레이아웃과 공학해석
1. 공학설계 2. 제품기획 2.1. 요구사항목록 3. 개념설계 3.1. 설계문제와 기능구조도 3.2. 동작원리와 설계대안 4. 기본설계 4.1. 시제품 레이아웃과 공학해석 ★ 4.2. 견실최적설계 4.2.1. 문제 정의 4.2.
vedacube.tistory.com
참고문헌
- MiSUMi. (n.d.). 기어란. MiSUMi. https://kr.misumi-ec.com/special/gear/about/?srsltid=AfmBOooudx1adjt6QXJkUs0XL8wv7yuJKfrgXTKxIUh2uC61ELPEB1AY. 2026.01.24.
-MiSUMi. (n.d.). 평기어 선정 참고 자료. MiSUMi. https://kr.misumi-ec.com/tech-info/categories/technical_data/td03/a0082.html?srsltid=AfmBOopAt5aUsIymNI5cT1IPqKCmJ85LRHY5FPW1U1qxFZVoiCUbjXTi. 2026.01.26.
- MiSUMi. (n.d.). 평기어 간이 선정 절차(예 3). MiSUMi. https://kr.misumi-ec.com/tech-info/categories/technical_data/td03/a0085.html?bid=bid_kr_ec_43766_192. 2026.01.26.
반응형'Engineering > Engineering Design' 카테고리의 다른 글
공학설계 | 기계요소(2): 타이밍벨트 선정 방법(2) - 둘레 길이와 너비 (0) 2026.03.06 공학설계 | 기계요소(2): 타이밍벨트 선정 방법(1) - 규격 (0) 2026.02.27 공학설계 | 상세설계: 제작도면과 자재소요서 (0) 2025.12.12 공학설계 | 견실최적설계(3): 민감도 분석 (0) 2025.11.21 공학설계 | 견실최적설계(2): 제1차 실험 설계 및 수행 (0) 2025.11.14